




特種機器人的低電壓大功率電機驅動系統設計
本期小編為您帶來的內容是特種機器人的低電壓大功率電機驅動系統設計,請跟隨小編一起來看一下吧。
1 特種機器人系統方案設計
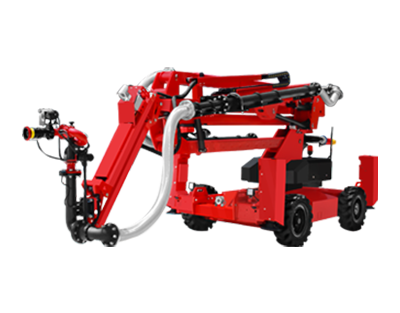
本設計需要驅動的特種機器人重約850 kg,所以要求底盤電機的輸出功率約為1 200 W,因此底盤電機驅動器的輸出功率至少應為1 500 W。機器人只能由自身攜帶的電池供電,并且要求其機動性強、體積小,所以設計中需使用24 V電池為驅動供電。根據1.5倍峰值電流的標準[1],本文需設計一個輸出電壓為24 V、輸出電流最大為100 A的驅動器。

特種機器人的低電壓大功率電機驅動系統設計
驅動器的整體框圖如圖1所示,包括STM32最小系統、串口模塊、DC-DC隔離電源模塊、狀態指示模塊、電機驅動電路和RCD吸收電路。
2 特種機器人硬件電路設計
本設計以STM32為控制核心,產生PWM波控制柵極驅動芯片IR2184,進而驅動由NMOS并聯搭建的H橋。同時本設計使用RCD吸收電路吸收電機啟停中的尖峰,均流保護電路使得并聯MOS管間的電流盡量均衡。
3.特種機器人驅動電路設計
在H橋中,要使NMOS管完全導通,要求VGS>10 V。對于下橋臂,直接加10 V以上的電壓就可使NMOS導通;但對上橋臂,要使NMOS導通,就必須滿足VG>VSS+10 V。因此必須使用浮動柵極驅動,才能使得上橋臂導通。柵極驅動芯片IR2184是懸浮柵極驅動芯片,具有自動死區時間控制,所以本設計使用其作為NMOS的驅動芯片。
關于特種機器人的低電壓大功率電機驅動系統設計,就先為您介紹到這里了,更多精彩內容我們下期繼續為您呈現。
相關標簽
上一篇
新聞分享