



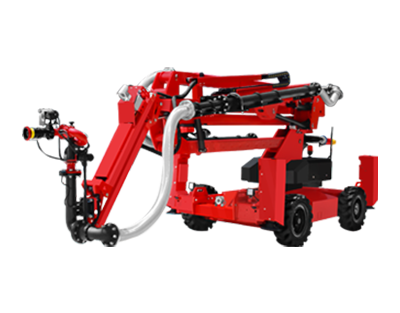

新型特種機器人
新型特種機器人具有四個可靈活擺動的履帶臂,機身完全被行走履帶包覆,因此其具有極強的地形適應能力和機動性,在通過障礙時不會出現(xiàn)一般履帶機器人經(jīng)常遇到的因底盤磕碰而進退兩難等狀況,具有較高的攀爬和越障能力。
以電機作為主動輪軸,對主動輪起到支撐、定位和驅動的多重作用,簡化了傳動機構,省去了傳統(tǒng)傳動方式中的軸承件,減輕了驅動裝置的重量。此外,特種機器人主動輪與擺臂都是由驅動電機直接驅動,省去了煩瑣的傳動機構,最大限度地節(jié)省了空間,降低了系統(tǒng)故障率,為移動機器人進一步小型化、輕量化提供了解決方案。
新型特種機器人
控制系統(tǒng)采用分層遞階的控制體系結構,主要包括:決策層、通信層和執(zhí)行層。決策層使機器人系統(tǒng)完全服從操縱者的命令,操作者將根據(jù)外部環(huán)境變化發(fā)出指令,使系統(tǒng)內部進行響應,形成對整個特種機器人系統(tǒng)的控制決策;通信層主要負責實施實時、高效、無差錯地與控制中心進行通信。執(zhí)行層通過驅動各個執(zhí)行部件來實現(xiàn)機器人的運動和動作,從而準確高效地完成任務。并且采用遙控的方式,提高了搜救機器人的應用價值。
相關標簽
新聞分享